




| Descriere metodă de calcul | Descriere program |
Poziţionarea planimetrică este cel mai utilizat tip de poziţionare, marea majoritate a lucrărilor geodezice necesitând o reprezentare pe un plan a situaţiei din teren. Reprezentarea unei părţi a suprafeţei terestre sau chiar a întregii suprafeţe se realizează prin intermediul hărţilor, adică prin intermediul unui număr finit de puncte reprezentative pentru suprafaţa de reprezentat.
Pentru o reprezentare planimetrică a suprafeţei terestre trebuie să se cunoască poziţia orizontală a acestor puncte care alcătuiesc aşa numitele reţele orizontale sau planimetrice. Poziţia planimetrică poate fi dată de coordonatele geodezice (latitudinea şi longitudinea) pe elipsoidul considerat că aproximează suprafaţa Pământului la momentul respectiv (elipsoidul de referinţă), sau într-un sistem bidimensional de coordonate, condiţia fiind cunoaşterea relaţiilor de legătură între cele două sisteme.
Funcţie de natura elementelor măsurate, reţelele geodezice planimetrice pot fi:
- Reţele de triangulaţie, în care sunt efectuate numai măsurători de direcţii unghiulare orizontale;
- Reţele de trilateraţie, în care se efectuează numai măsurători de distanţe;
- Reţele de triangulaţie-trilateraţie, în care se efectuează atât măsurători de direcţii unghiulare orizontale, cât şi măsurători de distanţe.
În ultima perioadă de timp, datorită perfecţionării aparatelor de măsură din domeniul geodeziei şi a condiţiilor atmosferice tot mai improprii pentru efectuarea observaţiilor unghiulare la distanţe mari, ultima categorie de reţele este cea mai utilizată pentru determinarea poziţiei planimetrice a punctelor.
Prelucrarea măsurătorilor efectuate în reţelele geodezice, indiferent de tipul acestor reţele, constituie ultima etapă a activităţii geodezice, în urma căreia se obţin rezultatele finale.
Prin prelucrarea observaţiilor din reţelele geodezice nu se poate îmbunătăţi precizia realizată în faza de efectuare a măsurătorilor, dar o prelucrare incorectă poate micşora această precizie sau, în cazuri extreme, poate conduce la obţinerea unor rezultate incorecte.
Principalul avantaj al compensării reţelelor geodezice prin metoda măsurătorilor indirecte constă în faptul că fiecărei observaţii îi corespunde o ecuaţie de corecţie, ceea ce permite efectuarea unui control riguros asupra alcătuirii modelului funcţional. Datorită corespondenţei dintre numărul măsurătorilor şi cel al ecuaţiilor este posibil ca procesul de compensare să poată fi complet automatizat.
O prelucrare a măsurătorilor prin metoda observaţiilor indirecte, cunoscută şi sub denumirea de "metoda variaţiei coordonatelor" sau "compensarea grupului de puncte" se realizează prin parcurgerea mai multor etape, în fiecare etapă obţinându-se rezultate care permit alegerea unor modele mai performante şi a unor valori mai precise pentru următoarele etape de calcul.
Prelucrarea observaţiilor efectuate în cadrul unei reţele planimetrice geodezice constă în parcurgerea următoarelor etape principale:
| Prelucrarea preliminară a observaţiilor geodezice şi reducerea observaţiilor la suprafaţa de referinţă aleasă. |
Prima etapă ce trebuie parcursă în cadrul procesului de compensare constă în determinarea coordonatelor preliminarii, denumite în unele lucrări şi de lucru. Acestea se determină cu o precizie scăzută, precizie care depinde în general de scopul urmărit şi de lungimea laturilor reţelei considerate.
Pentru că sistemul de proiecţie utilizat oficial în România este sistemul stereografic 1970 şi pentru că prelucrarea observaţiilor se face, de regulă într-un sistem bidimensional, în continuare se va considera că acest plan este suprafaţa de referinţă unde se vor reduce observaţiile geodezice.
Pentru reducerea direcţiilor azimutale (compensate în staţie) pe suprafaţa de referinţă trebuie aplicate mai multe corecţii:
- corecţia de reducere de la secţiunea normală directă la linia geodezică;
- corecţia datorată altitudinii punctului vizat;
- corecţia datorată deviaţiei verticalei;
- corecţia de centrare şi reducere;
- corecţia de reducere la planul proiecţiei stereografice 1970.
În cazul în care în reţeaua geodezică au fost efectuate măsurători de distanţe, acestea trebuie reduse la suprafaţa de referinţă aleasă. După ce au fost corectate fizic (în general instrumentele moderne de măsurat distanţe aplică această corecţie în mod automat), distanţelor măsurate trebuie aplicate, în ordine, următoarele reduceri:
- reducerea la coardă;
- reducerea la suprafaţa elipsoidului de referinţă;
- reducerea la planul proiecţiei stereografice 1970.
Această etapă de prelucrare preliminară a observaţiilor geodezice şi reducere la suprafaţa de referinţă aleasă, se consideră efectuată de către utilizator, drept pentru care în program vor fi introduse observaţiile reduse la suprafaţa de referinţă.
| Calculul elementelor provizorii. |
După calculul elementelor preliminarii şi reducerea observaţiilor efectuate la o suprafaţă de referinţă unitară urmează determinarea unor alte coordonate pentru punctele noi ale reţelei, coordonate denumite coordonate provizorii. Valorile coordonatelor provizorii trebuie să fie suficient de apropiate de valorile cele mai probabile pentru ca să se poată renunţa la termenii de ordinul II şi mai mari din dezvoltările în serie Taylor care se efectuează.
Aceste coordonate provizorii se determină cu o precizie mai ridicată decât coordonatele preliminarii, pentru cea mai mare parte a reţelelor geodezice utilizate precizia fiind de ordinul centimetrilor.
Acestea sunt determinate de utilizator prin diferite metode (radiere, intersecţie înainte, intersecţie înapoi etc.) şi apoi introduse în fişierul de date ce va fi încărcat în programul de compensare.
| Formarea modelului funcţional-stohastic. |
Modelul funcţional-stohastic la prelucrarea observaţiilor efectuate într-o reţea planimetrică este reprezentat de relaţiile (1) şi (2).

|
(1) |

|
(2) |
Notaţii:
v - vectorul corecţiilor;
A - matricea coeficienţilor;
x - vectorul parametrilor (necunoscutelor);
l - vectorul termenilor liberi;
Cm - matricea de varianţă-covarianţă a măsurătorilor;
σ02 - varianţa unităţii de pondere sau factor de varianţă;
Qm - matricea cofactorilor măsurătorilor.
Într-o reţea geodezică planimetrică se pot efectua observaţii unghiulare orizontale şi măsurători de distanţe. Pentru aceste două tipuri de observaţii posibile, care intervin în prelucrare, se vor scrie ecuaţiile de corecţii.
a) Direcţii azimutale centrate, reduse şi reduse la planul de proiecţie:
Se consideră un punct de staţie "S" dintr-o reţea geodezică, în care s-au efectuat observaţii unghiulare orizontale (direcţii azimutale) către alte puncte geodezice din reţea 1, 2, ..., j, ..., n.
După compensarea în staţie, când se realizează şi reducerea direcţiilor observate la o direcţie de referinţă (cazul prezentat în figura 1 - direcţia către punctul 1), şi prelucrările preliminarii, se obţin direcţiile centrate, reduse şi reduse la planul de proiecţie, care în continuare vor fi considerate ca elemente măsurate: αS1*, αS2*, ..., αSj*, ..., αSn*.
 Figura 1. Punct de staţie în care s-au efectuat observaţii unghiulare orizontale.
Figura 1. Punct de staţie în care s-au efectuat observaţii unghiulare orizontale.
Aceste valori ale direcţiilor vor fi corectate, prin procesul de prelucrare, obţinându-se valorile cele mai probabile ale acestora:

|
(3) |
În acest punct de staţie se cunosc orientările provizorii către celelalte puncte vizate, orientări determinate din coordonate, relaţia (4).

|
(4) |
Cu ajutorul acestor orientări şi a direcţiilor măsurate se pot calcula unghiurile de orientare corespunzătoare:

|
(5) |
Prin medierea celor "n" valori obţinute, relaţia (6), se obţine o valoare provizorie a unghiului de orientare a staţiei S.

|
(6) |
Dacă la această valoare provizorie se adaugă necunoscuta corespunzătoare, ce se determină prin procesul de compensare, se obţine valoarea cea mai probabilă:

|
(7) |
După prelucrarea observaţiilor efectuate în reţea, în fiecare staţie, deci şi în staţia S, trebuie să fie satisfăcute egalităţile de forma:

|
(8) |
Într-o staţie, dacă se consideră valorile provizorii, se vor obţine "n" ecuaţii de forma:

|
(9) |
sau

|
(10) |
în care s-a notat

|
(11) |
Termenul liber al ecuaţiilor de corecţii pentru direcţiile azimutale măsurate se determină, deci, ca fiind diferenţa dintre unghiul de orientare a staţiei calculat pentru direcţia respectivă, relaţia (5), şi unghiul mediu de orientare, determinat ca medie aritmetică simplă, relaţia (6). De obicei, acest termen liber se exprimă în secunde.
Datorită modului de calcul a unghiului de orientare, întotdeauna, într-o staţie, suma termenilor liberi va fi zero:

|
(12) |
Dacă în relaţia (10) se ţine cont de forma expresiei prin care se exprimă variaţia orientării în funcţie de variaţia coordonatelor plane, relaţia (13), şi se consideră că direcţia azimutală a fost măsurată între două puncte noi, se obţine forma generală a unei ecuaţii de corecţii pentru direcţii unghiulare orizontale, relaţia (16).

|
(13) |
Cu aij, bij s-au notat coeficienţii de direcţie, şi sunt daţi de relaţiile (14) şi (15).

|
(14) |

|
(15) |
Funcţie de tipul punctului de staţie şi a celui vizat (vechi sau nou) se stabilesc şi celelalte forme posibile ale ecuaţiilor de corecţii, relaţiile (17), (18) şi (19).
- Forma ecuaţiei de corecţie pentru o direcţie azimutală măsurată între două puncte noi "i" şi "j":

|
(16) |
- Forma ecuaţiei de corecţie pentru o direcţie azimutală măsurată între un punct vechi "i" şi un punct nou "j":

|
(17) |
- Forma ecuaţiei de corecţie pentru o direcţie azimutală măsurată între un punct nou "i" şi un punct vechi "j":

|
(18) |
- Forma ecuaţiei de corecţie pentru o direcţie azimutală măsurată între două puncte vechi "i" şi "j":

|
(19) |
b) Distanţe reduse la planul de proiecţie:
Se consideră două puncte din reţeaua geodezică "i" şi "j", între care s-au efectuat măsurători pentru determinarea distanţei. Cu valoarea măsurată (Dij*) şi valoarea provizorie (Dij0), determinată din coordonate provizorii, se poate scrie o relaţie de următoarea formă:

|
(20) |
, unde vijD reprezintă corecţia, ce se va determina prin prelucrare, care adăugată valorii măsurate va rezulta valoarea compensată (cea mai probabilă), iar dDij reprezintă variaţia distanţei funcţie de variaţia coordonatelor plane ale punctelor între care s-a efectuat măsurătoarea.
Dacă se are în vedere relaţia (21), care exprimă variaţia distanţei funcţie de variaţia coordonatelor plane, şi că termenul liber al ecuaţiei (20), se determină cu relaţia (24), atunci se pot exprima formele ecuaţiilor de corecţie pentru o distanţă măsurată între două puncte cu relaţiile (25), (26) şi (27).

|
(21) |
Cu Aij, Bij s-au notat coeficienţii de distanţă, şi se exprimă cu ajutorul relaţiilor (22) şi (23).

|
(22) |

|
(23) |
- Forma termenului liber:

|
(24) |
- Forma ecuaţiei de corecţie pentru o distanţă măsurată între două puncte noi "i" şi "j":

|
(25) |
- Forma ecuaţiei de corecţie pentru o distanţă măsurată între un punct vechi "i" şi un punct nou "j":

|
(26) |
- Forma ecuaţiei de corecţie pentru o distanţă măsurată între un punct nou "i" şi un punct vechi "j":

|
(27) |
Între două puncte vechi nu se fac măsurători de distanţe.
| Stabilirea ponderilor măsurătorilor geodezice. |
În relaţia (28), pentru o prelucrare cât mai corectă, matricea ponderilor ar trebui să fie o matrice plină, însă determinarea elementelor dreptunghiulare (pij şi, respectiv, qij cu i≠j) nu este întotdeauna posibilă.

|
(28) |
În cazul măsurătorilor independente prelucrarea se efectuează sub condiţia (29), adică matricea ponderilor devine o matrice diagonală (pij = 0, pentru i≠j), ceea ce uşurează foarte mult calculele.

|
(29) |
Pentru măsurătorile unghiulare orizontale ponderile pot fi determinate prin aplicarea relaţiei (30), iar pentru distanţele măsurate relaţia (31).

|
(30) |

|
(31) |
Cu sij'α s-a notat abaterea standard a unei direcţii unghiulare orizontale măsurate şi se determină cu relaţia (32), iar cu sij'D s-a notat abaterea standard a unei distanţe măsurate şi se determină cu relaţia (33).

|
(32) |

|
(33) |
, unde:
sα - precizia aparatului pentru măsurarea direcţiilor unghiulare orizontale, exprimată în secunde (ex: sα = 10cc);
ρcc = 636620cc;
sdorit - precizia finală urmărită, exprimată în metri (ex: sdorit = 0.001m);
a, b - constantele aparatului pentru măsurarea distanţelor exprimate în mm, respectiv mm/km (ex: sij'D = 2mm + 2ppm).
| Transformarea ecuaţiilor de corecţii după regulile de echivalenţă. |
Dacă două sisteme de ecuaţii ale corecţiilor conduc, prin normalizare, la obţinerea aceluiaşi sistem normal de ecuaţii, deci în final, prin rezolvare, la aceleaşi soluţii, atunci cele două sisteme de ecuaţii sunt echivalente. Trecerea de la un sistem de ecuaţii de corecţii la un alt sistem echivalent este o operaţie care simplifică foarte mult calculele, conducând la obţinerea unor sisteme cu mai puţine necunoscute şi/sau mai puţine ecuaţii.
În cadrul programului se va utiliza doar prima regulă de echivalenţă.
În reţelele geodezice planimetrice, în care s-au efectuat observaţii unghiulare orizontale, în fiecare punct de staţie, indiferent de tipul acestuia (nou sau vechi), când se scriu ecuaţiile de corecţii se va obţine un sistem în care există o necunoscută, necunoscuta de orientare a staţiei notată dz, care are acelaşi coeficient (-1) în toate ecuaţiile.
Dacă se consideră un punct de staţie, oarecare, S din care au fost efectuate observaţii unghiulare orizontale către alte "t" puncte - vechi şi/sau noi - din reţea şi dacă se notează cu "u" numărul de necunoscute dx, dy implicate (u = 2 * numărul punctelor noi care intervin la scrierea ecuaţiilor din această staţie), sistemul ecuaţiilor de corecţii are următoarea formă:

|
(34) |
Deci în fiecare staţie, se formează un sistem de "t" ecuaţii cu "u+1" necunoscute. Ecuaţiile din sistemul (34) pot avea una din formele prezentate în relaţiile (16), (17), (18) sau (19).
Prin aplicarea primei reguli Schreiber de echivalenţă se obţine următorul sistem de ecuaţii ale corecţiilor, de "t+1" ecuaţii şi "u" necunoscute:

|
(35) |
În afara eliminării necunoscutei dz, din sistemul de ecuaţii (35) mai sunt eliminate, dacă există, şi ecuaţiile scrise între două puncte vechi, care nu mai au sens, deoarece acestea nu mai conţin necunoscute.
Prin aplicarea acestei reguli de echivalenţă pentru întreaga reţea planimetrică se elimină atâtea necunoscute dz câte puncte au fost staţionate pentru efectuarea observaţiilor unghiulare orizontale.
| Normalizarea sistemului de ecuaţii liniare şi rezolvarea sistemului normal de ecuaţii. |
După scrierea ecuaţiilor de corecţii şi aplicarea primei reguli de echivalenţă urmează normalizarea sistemului de ecuaţii ale corecţiilor şi evident rezolvarea acestuia. Prin rezolvarea sistemului normal de ecuaţii se determină mai întâi necunoscutele, apoi corecţiile observaţiilor.

|
(36) |

|
(37) |
Notaţii:
N - matricea sistemului normal de ecuaţii;
A - matricea coeficienţilor sistemului de ecuaţii ale corecţiilor;
P - matricea ponderilor;
x - vectorul necunoscutelor;
l - vectorul termenilor liberi.
| Calculul elementelor compensate. |
Valorile compensate ale coordonatelor se determină adăugând la valorile provizorii soluţiile sistemului, conform relaţiilor (38) şi (39).

|
(38) |

|
(39) |
Pentru fiecare staţie în care s-au efectuat observaţii unghiulare orizontale se determină corecţia pentru unghiul de orientare:

|
(40) |
variaţia orientării determinându-se cu ajutorul relaţiei (13).
Urmează apoi determinarea corecţiilor măsurătorilor, pentru aceasta utilizând relaţia (10), dacă este vorba despre direcţii unghiulare orizontale, sau relaţia (25), dacă este vorba despre distanţe.
Verificarea calculelor corecţiilor pentru direcţii azimutale, în cazul unei staţii, se face prin controlul îndeplinirii egalităţii (în limita preciziei de calcul):

|
(41) |
| Calcule de evaluare a preciziei. |
Orice prelucrare a observaţiilor efectuate într-o reţea geodezică se încheie cu calculele de evaluare a indicatorilor de precizie.
- Abaterea standard (eroarea medie pătratică) a unităţii de pondere:

|
(42) |
, unde "m" reprezintă numărul de măsurători, iar "n" numărul de necunoscute.
- Abaterea standard a unei măsurători individuale compensate:

|
(43) |
- Abaterea standard a necunoscutelor:

|
(44) |
- Abaterea standard totală pentru un punct oarecare k:

|
(45) |
- Abaterea standard a întregii reţele:

|
(46) |
, unde u reprezintă numărul de puncte determinate.
- Determinarea elementelor elipselor erorilor:
După compensarea reţelei planimetrice, se poate obţine pentru fiecare punct k nou din reţea varianţele coordonatelor, relaţia (44), care dau abaterile standard ale poziţiei punctului pe axele de coordonate.
 Figura 2. Elipsa erorilor.
Figura 2. Elipsa erorilor.
Dacă se doreşte abaterea standard pe o direcţie oarecare se utilizează elipsa erorilor (figura 2), a cărei elemente se determină cu următoarele relaţii:

|
(47) |

|
(48) |

|
(49) |

|
(50) |
Notaţii:
a - semiaxa mare;
b - semiaxa mică;
λ1,2 - constante;
θ - orientarea semiaxei mari.
Sursa bibliografică: „Geodezie” - Prof.univ.dr.ing. Constantin Moldoveanu
După cum se poate observa în figura 3, programul este format din 4 câmpuri. În cele ce urmează vom enumera şi descrie aceste câmpuri.
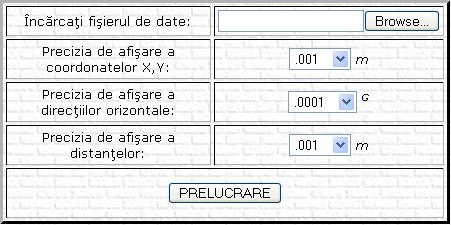 Figura 3. Compensare 2D(X,Y).
Figura 3. Compensare 2D(X,Y).
| Câmpul 1: „Încărcaţi fişierul de date”. |
Se va încărca, acţionând butonul "Browse", un fişier text (nu se ţine cont de extensie). Acesta este format, în general, din 3 secţiuni:
a) Secţiunea "COORD":
În cadrul acestei secţiuni sunt introduse coordonatele X, Y ale punctelor, exprimate în metri, însoţite de denumirea şi de tipul acestora. În secvenţa de mai jos este prezentată structura acestei secţiuni:
COORD
denumire_1,x_1,y_1,F
denumrie_2,x_2,y_2,F
.
.
.
denumire_n,x_n,y_n,P
*ENDCOORD
Secţiunea este considerată validă dacă începe cu şirul de caractere "COORD" şi se încheie cu şirul de caractere "*ENDCOORD". Între cele două, trebuie să se găsească punctele de coordonate X, Y ce intră în compensare pe rânduri individuale structurate astfel: denumirea punctului, coordonata X, coordonata Y şi tipul punctului. Acestea sunt separate între ele prin caracterul "," (virgulă).
Un punct poate fi de două tipuri: "F" (Fix) sau "P" (Provizoriu).
Denumirile punctelor pot conţine spaţii.
b) Secţiunea "DIR":
În cadrul acestei secţiuni sunt introduse direcţiile unghiulare orizontale între puncte, exprimate în grade centezimale, şi precizia de măsurare a direcţiilor azimutale oferită de aparatul cu care s-au efectuat măsurătorile (aceasta se poate lua din cartea tehnică a aparatului), exprimată în secunde.
În secvenţa de mai jos se poate observa structura acestei secţiuni:
DIR,precizie_dir
ST,denumire_1
denumire_2,directia_1_1
.
.
.
*ENDST
ST,denumire_2
denumire_1,directia_2_1
denumire_3,directia_2_2
.
.
.
*ENDST
*ENDDIR
Secţiunea începe cu şirul de caractere "DIR", urmat de precizia aparatului de măsurare a direcţiilor unghiulare orizontale, separate prin caracterul "," (virgulă), şi se încheie cu şirul de caractere "*ENDDIR".
Această secţiune este împărţită în subsecţiuni, ce reprezintă punctele de staţii din care s-au efectuat măsurătorile. Subsecţiunile încep cu şirul de caractere "ST", urmat de denumirea punctului de staţie, despărţite prin caracterul ",", şi se încheie cu şirul de caractere "*ENDST".
Fiecare subsecţiune (punct de staţie) are în componenţă o listă de puncte vizate, dispuse pe rânduri consecutive, structurate astfel: denumirea punctului vizat, direcţia unghiulară orizontală măsurată de la punctul de staţie la punctul vizat. Acestea sunt separate între ele cu ajutorul caracterului ",".
Denumirile punctelor de staţii şi punctelor vizate trebuie să se găsească în lista punctelor de coordonate, din cadrul secţiunii "COORD".
c) Secţiunea "DIST":
În cadrul acestei secţiuni sunt introduse distanţele măsurate între puncte, exprimate în metri, şi constantele aparatului de determinare a preciziei de măsurare a distanţei (se pot lua din cartea tehnică a aparatului), exprimate în mm, respectiv mm/km (ppm).
În secvenţa de mai jos este prezentată structura acestei secţiuni:
DIST,precizie_dist_1,precizie_dist_2
denumire_1,denumire_2,distanta_1
denumire_1,denumire_3,distanta_2
.
.
.
*ENDDIST
Secţiunea începe cu şirul de caractere "DIST", urmat de constantele aparatului de determinare a preciziei de măsurare a distanţei, separate prin caracterul "," (virgulă), şi se încheie cu şirul de caractere "*ENDDIST".
După cum se poate observa, secţiunea este structurată astfel: denumirea punctului de staţie, denumirea punctului vizat, distanţa măsurată între cele două puncte. Elementele sunt separate între ele cu ajutorul caracterului ",".
Denumirile punctelor trebuie să se găsească în lista punctelor de coordonate, din cadrul secţiunii "COORD".
Nu se măsoară distanţe între două puncte de coordonate fixe (de tipul "F").
Funcţie de tipul reţelei, putem distinge:
- Reţea de triangulaţie - poate lipsi secţiunea "DIST";
- Reţea de trilateraţie - poate lipsi secţiunea "DIR";
- Reţea de triangulaţie-trilateraţie - ambele secţiuni trebuie să fie prezente în fişierul de date.
| Câmpul 2: „Precizia de afişare a coordonatelor X, Y”. |
Coordonatele X şi Y ale punctelor au unitatea de măsură exprimată în metri (m) şi precizia de afişare funcţie de numărul de zecimale selectat.
| Câmpul 3: „Precizia de afişare a direcţiilor unghiulare orizontale”. |
Direcţiile unghiulare orizontale au unitatea de măsură exprimată în grade centezimale (G) şi precizia de afişare funcţie de numărul de zecimale selectat.
| Câmpul 4: „Precizia de afişare a distanţelor”. |
Distanţele au unitatea de măsură exprimată în metri (m) şi precizia de afişare funcţie de numărul de zecimale selectat.
Observaţii:
Acest program poate fi utilizat în mod iterativ, coordonatele compensate obţinute într-o primă compensare putând fi utilizate pe post de coordonate provizorii pentru aceleaşi puncte noi, într-o a doua compensare. Nu modificaţi măsurătorile iniţiale cu cele compensate, ci doar coordonatele provizorii.
Dacă toate datele au fost introduse corect se acţionează butonul "PRELUCRARE".